(一)基本情況介紹
智能巡檢係統由運行軌道、巡檢機器人、無線通訊基站以及監控中心組成。係統通過無線通信實現數據和圖像采集並保證巡檢機器人穩定可靠運行。係統能夠對皮帶托輥、滾筒、電機等設備在生產過程中連續、高質量、長時間的往複巡檢。智能巡檢機器人通過搭載紅外熱視儀實時采集巡檢設備的紅外熱像圖及各點溫度,根據設備溫度異常情況及時反饋到監控中心並根據設定值做出報警顯示,同時利用識別卡和圖像準確地定位故障位置便於及時處理。智能巡檢機器人配備煙霧傳感器、甲烷傳感器和高清攝像機,可以實時監測巡檢區域環境及帶式輸送機運行狀況。可搭載音頻拾音器,實時對比曆史音頻數據文件,當正常運行中采集到的聲音有異常時能夠及時發現並報警。
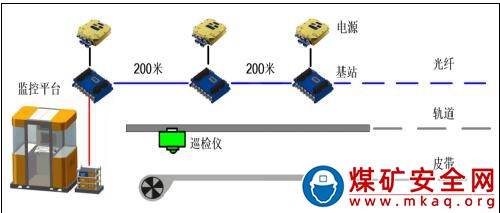
巡檢機器人吊掛在巷道中心線靠近帶式輸送機側上方的軌道上,按設定方式對帶式輸送機進行巡檢。巡檢機器人采用無線通訊方式進行信號傳輸,帶式輸送機沿線設置無線基站,為確保信號傳輸的穩定性,每200米設置一台無線基站(若遇到起伏較大等特殊地段,需增加基站)。基站之間通過光纖進行信號傳輸,每台基站配一台電源箱。井下控製硐室設置礦用隔爆兼本安型自動化主機、硬盤錄像機及顯示器,將巡檢機器人巡檢過程中的圖像、紅外熱成像、氣體等相關參數以及相關故障信息及時提供給現場司機。地麵設置遠程控製站,係統通過礦井的工業環網將數據傳輸至地麵進行遠程監控。
(二)主要特點及創造性
視頻監測自動識別技術:應用熱成像技術和發熱故障的圖像識別技術,通過采集帶式輸送機上物體溫度信息並進行03manbetx ,實現在煤礦井下黑暗環境下帶式輸送機上的異物識別;通過檢測設備溫度來判斷設備是否存在故障。異常聲音提取識別技術:利用采集到的聲波信息使用聲音軟件進行模擬03manbetx 、計算,能夠在高聲強噪音的環境下對異常聲音有效識別,檢測損壞托輥並報警,通知人員及時更換,防止因托輥故障引起的帶式輸送機跑偏等現象。RFID標簽定位巡檢係統:采用編碼器測距與標簽固定位置校準的定位算法,在軌道上安裝RFID標簽標簽與巡檢機器人上的采集與控製單元上的RFID讀寫器進行通訊,實現軌道坐標的讀寫,有效降低定位誤差。具有沿軌道方向的避障和防超速保護功能:當在巡檢機器人的運行方向遇到障礙物(包括人員)時,巡檢機器人在預設距離(可設定)進行刹車,停止行走,當巡檢機器人速度達到設定值時,啟動降速係統,速度達到設定值2倍時,啟動刹車係統,巡檢機器人停止行走。自動充電係統(暫未應用):巡檢機器人自帶電源,當電量不足時會利用了超聲波測距的原理進行檢測充電裝置,並進入充電裝置腔內,充滿電的巡檢機器人和行駛來的電量低機器人進行互換,充滿電的機器人離開充電裝置進行自動巡檢,電量低的巡檢機器人自動進行充電,從而達到自動充電的目的。目前井下有線或無線充電設備暫時無法取得安標認證,巡檢機器人在井下采用更換電池方式,每套巡檢機器人配備 2 套電池組。
(三)使用效果
帶式輸送機巡檢機器人已在鮑店煤礦7304掘錨工作麵進行試驗應用,目前係統調試運行穩定,實現了監控、巡查等功能,係統數據已接入集控中心,取消了日常巡檢人員,每日可減員3人。
(四)使用單位及聯係方式
鮑店煤礦13954738331。
(五)效果圖